MaxCompute支持您在Python UDF中引用第三方包,例如Numpy包、需要编译的第三方包或依赖动态链接库的第三方包。本文为您介绍如何通过Python UDF引用第三方包。
背景信息
通过Python UDF使用第三方包支持的场景如下:
您需要修改Numpy包的后缀格式,基于MaxCompute客户端上传Numpy包,并注册函数。函数注册成功后即可通过Python 3 UDF调用。
您需要在与MaxCompute兼容的环境下,对第三方资源包中的setup.py脚本进行编译生成WHEEL包,并修改后缀格式。基于MaxCompute客户端上传包,并注册函数。函数注册成功后即可通过Python UDF调用。推荐使用Linux环境,Windows用户推荐使用Docker。
您需要基于第三方包的源码编译so链接库,然后编译生成WHEEL包,并修改后缀格式。基于MaxCompute客户端上传包和so链接库文件,并注册函数。函数注册成功后即可通过Python UDF调用。
前提条件
在执行操作前,请确认已完成如下操作:
已安装Python环境。推荐使用Python 3。
已安装并配置MaxCompute客户端。客户端配置详情请参见安装并配置MaxCompute客户端。
如果您通过Python UDF使用需要编译的第三方包,请确认已安装pip、setuptools(通过
pip install setuptools安装)和wheel(通过pip install wheel安装)。如果您使用的第三方包为GDAL 3.0及以上版本,请确认已安装PROJ 6。
如果您通过Docker编译第三方包,请确认已安装Docker,详情请参见Docker安装文档。
使用Numpy包(Python 3 UDF)
您可以通过MaxCompute内置的Python 3环境使用Numpy包。MaxCompute内置的Python 2环境默认安装了Numpy,不需要手动上传Numpy包。通过Python 3 UDF使用Numpy包的步骤如下:
以1.19.2版本为例,在PyPI页面的Download files区域,单击文件名后缀为cp37-cp37m-manylinux1_x86_64.whl的NumPy包进行下载。
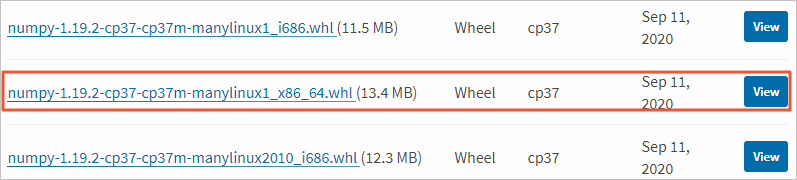 说明
说明其它后缀名称的包可能会加载失败。如果您需要选择其他版本,在PyPI页面左上角的Navigation区域,单击Release history即可查看历史版本。
修改下载的Numpy包后缀为ZIP格式。
例如numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip。
通过MaxCompute客户端上传NumPy包至MaxCompute项目空间。上传资源详情请参见资源操作。
命令示例如下:
ADD ARCHIVE D:\Downloads\numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip -f;编写Python UDF脚本,保存为PY格式文件。
假设此处保存的脚本名称为import_numpy.py。Python UDF脚本示例如下:
from odps.udf import annotate @annotate("->string") class TryImport(object): #类名为TryImport。 def __init__(self): import sys sys.path.insert(0, 'work/numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip') #Numpy包,您只需要替换work/后边的包名即可。 def evaluate(self): import numpy return "import succeed"通过MaxCompute客户端将import_numpy.py脚本以资源形式上传至MaxCompute项目空间。
命令示例如下:
ADD PY D:\Desktop\import_numpy.py -f;使用上传的import_numpy.py脚本及Numpy包,通过MaxCompute客户端注册自定义函数。注册函数详情请参见函数操作。
假设注册的自定义函数名为numpy,函数资源所在项目为test_project。命令示例如下:
CREATE FUNCTION numpy AS 'import_numpy.TryImport' USING 'test_project/resources/import_numpy.py,numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip';说明注册函数时资源列表里需要加上Numpy包,例如numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip。
完成注册后您即可编写SQL语句调用新建的自定义函数。执行SQL语句时需要开启 Python3,详情请参见UDF开发规范与通用流程(Python3)。
使用需要编译的第三方包
如果第三方包是PyPI页面中格式为TAR.GZ的压缩包,或从GitHub下载的源码包,这些包解压后的根目录下有时会存在setup.py文件。在使用这种类型的第三方包前,您需要先在与MaxCompute兼容的环境下将setup.py编译生成WHEEL包,然后再执行上传资源及注册函数操作,即可通过Python UDF调用第三方包。上传资源及注册函数操作请参见使用Numpy包(Python 3 UDF)。
由于第三方包是运行在Linux环境的,推荐您使用Linux环境编译第三方包,使用Windows环境编译会存在包不兼容的问题。
如果您使用Windows环境,推荐在Docker的quay.io/pypa/manylinux2010_x86_64镜像容器中使用对应版本的Python(
/opt/python/cp27-cp27m/bin/python或/opt/python/cp37-cp37m/bin/python3)编译生成WHEEL包。
以Linux环境为例,确保环境兼容的关注点如下:
需要使用兼容的Python版本。在系统的命令行窗口执行如下命令,检查环境Python版本。
python -c "import wheel.pep425tags; print(wheel.pep425tags.get_abi_tag())"如果返回值为
cp27m或cp37m,表示Python版本满足兼容性。如果返回值为
cp27mu或cp37mu,表示Python版本不满足兼容性。您需要在系统的命令行窗口执行./configure --enable-unicode=ucs2命令配置Python编码格式为UCS2。
如果涉及C或C++代码依赖,需要使用兼容的GCC(GNU Compiler Collection)版本。
说明推荐您使用GCC 4.9.2及以下版本,GCC版本高于4.9.2时,编译生成的WHEEL包中的SO类型文件可能与MaxCompute环境不兼容。
确认环境满足兼容性要求后,以Linux系统为例,通过setup.py生成WHEEL包的步骤如下:
将第三方包解压到本地,在系统的命令行窗口,切换路径至setup.py文件所在文件夹。
例如,下载的包为GDAL-3.2.0.zip,解压后setup.py文件所在路径为D:\Downloads\GDAL-3.2.0,命令示例如下:
cd D:\Downloads\GDAL-3.2.0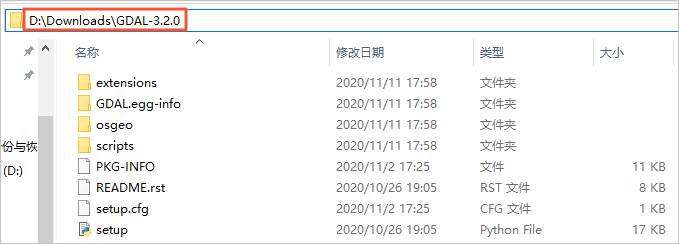
在系统的命令行窗口,执行如下命令查看返回结果中是否有bdist_wheel。
命令示例如下:
python setup.py --help-command在系统的命令行窗口,执行如下命令编译生成WHEEL包。
python setup.py bdist_wheel说明WHEEL包在dist目录下。
使用依赖动态链接库的第三方包
部分Python第三方包除了依赖Python库,可能还会依赖其它动态链接库的依赖。以GDAL 3.0.4为例,为您介绍如何使用Docker的quay.io/pypa/manylinux2010_x86_64镜像容器,编译相关的so链接库,并编译生成可以在MaxCompute上使用的WHEEL包。基于生成的so链接库文件、WHEEL包或Numpy包,再执行上传资源及注册函数操作,即可通过Python UDF调用第三方包。上传资源及注册函数操作请参见使用Numpy包(Python 3 UDF)。
请确认您已安装Docker后再执行后续步骤。Docker操作详情请参见Docker文档。
通过Python UDF使用依赖so链接库的第三方包的操作步骤如下:
查看依赖项。您可以在PyPI页面的Dependencies区域查看依赖项。
例如GDAL 3.0.4的依赖项如下。
 说明
说明在图示中,依赖项包括libgdal和numpy。libgdal需要在镜像容器中通过编译GDAL源码得到,numpy需要在PyPI页面或通过Docker镜像容器下载NumPy包。
下载Numpy包。
您可以选择如下两种方式之一下载Numpy包:
在PyPI页面的Download files区域,单击文件名后缀为cp37-cp37m-manylinux1_x86_64.whl的NumPy包进行下载。
说明需要注意的是,如果您的Python环境为Python 2,Numpy包需要在PyPI页面左侧的Navigation区域,单击Release history,选择1.16.6及之前版本,且后缀为cp27-cp27m-manylinux1_x86_64.whl的包进行下载。
在Docker的quay.io/pypa/manylinux2010_x86_64镜像容器中,执行
/opt/python/cp37-cp37m/bin/pip download numpy -d ./命令下载NumPy包到当前目录。
编译so链接库。
下载GDAL 3.0.4源码并解压到本地。
使用Docker下载quay.io/pypa/manylinux2010_x86_64镜像容器,进入终端输入模式。
命令示例如下:
docker pull quay.io/pypa/manylinux2010_x86_64 docker run -it quay.io/pypa/manylinux1_x86_64 /bin/bash上传GDAL 3.0.4源码到镜像容器中。
在镜像容器中编译GDAL 3.0.4,操作详情请参见BuildingOnUnix。
命令示例如下:
# configure选项中需要指定安装PROJ 6的位置。 ./configure --prefix=/path/to/install/prefix --with-proj=/path/to/install/proj6/prefix make make install export PATH=/path/to/install/prefix/bin:$PATH export LD_LIBRARY_PATH=/path/to/install/prefix/lib:$LD_LIBRARY_PATH export GDAL_DATA=/path/to/install/prefix/share/gdal # Test gdalinfo --version编译过程中可能出现如下报错:
configure: error: PROJ 6 symbols not found:GDAL 3.0及以上版本依赖PROJ 6,需要您下载安装PROJ 6。fatal error: zlib.h: No such file or directory:改用yum install zlib-devel命令编译。
使用Docker下载命令将两个so链接库(非软链接)下载到本机,在GDAL、PROJ 6安装目录的lib文件夹下获取libgdal.so和libproj.so。
在镜像容器中制作GDAL WHEEL包。操作详情请参见BuildingOnUnix。
命令示例如下:
# 如果需要numpy支持,要先安装numpy。 /opt/python/cp37-cp37m/bin/pip install numpy # 切换到GDAL源码目录下。 cd swig/python # 生成WHEEL包,在dist目录下。WHEEL包示例:GDAL-3.0.4-cp37-cp37m-linux_x86_64.whl /opt/python/cp37-cp37m/bin/python setup.py bdist_wheel基于生成的so链接库文件、WHEEL包或Numpy包,再执行上传资源及注册函数操作,即可实现通过Python UDF使用第三方包。上传资源及注册函数操作请参见使用Numpy包(Python 3 UDF)。
需要注意的是:
在上传资源时,您需要以FILE资源形式上传libgdal.so和libproj.so,以ARCHIVE资源形式上传numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip和GDAL-3.0.4-cp37-cp37m-linux_x86_64.zip。
在注册函数时,您需要在函数资源列表中添加libgdal.so、libproj.so、numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip和GDAL-3.0.4-cp37-cp37m-linux_x86_64.zip。
Python UDF代码示例如下:
说明本示例为Python 3代码,请在Python 3环境中执行。如果您需要在Python 2环境执行,请注意
get_cache_file参数的使用方法,详情可参见引用资源。# coding: utf-8 from odps.udf import annotate from odps.distcache import get_cache_file def include_file(file_name): import os, sys so_file = get_cache_file(file_name, 'b') with open(so_file.name, 'rb') as fp: content=fp.read() so = open(file_name, "wb") so.write(content) so.flush() so.close() @annotate("->string") class TryImport(object): def __init__(self): import sys include_file('libgdal.so.26') include_file('libproj.so.15') sys.path.insert(0, 'work/GDAL-3.0.4-cp37-cp37m-linux_x86_64.zip') #编译后的GDAL包,您只需要替换work/后边的包名即可。 sys.path.insert(0, 'work/numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip') #Numpy包,您只需要替换work/后边的包名即可。 def evaluate(self): from osgeo import gdal from osgeo import ogr from osgeo import osr from osgeo import gdal_array from osgeo import gdalconst return "import succeed"说明运行时如果报错找不到libgdal.so.26、libproj.so.15,您需要修改libgdal.so、libproj.so为libgdal.so.26、libproj.so.15。