MaxCompute allows you to reference third-party packages in Python user-defined functions (UDFs). The packages can be NumPy packages, third-party packages that need to be compiled, and third-party packages that are dependent on dynamic-link libraries (DLLs). This topic describes how to reference third-party packages in Python UDFs.
Background information
You can reference third-party packages in Python UDFs in the following scenarios:
Reference NumPy packages in Python 3 UDFs
You must change the name extension of the NumPy package, use the MaxCompute client to upload the NumPy package, and then create a UDF. You can call the Python 3 UDF after you create the UDF.
Reference third-party packages that need to be compiled
You must compile the setup.py script in a third-party package, generate a wheel package, and then change the name extension of the wheel package in an environment that is compatible with MaxCompute. Then, use the MaxCompute client to upload the wheel package and create the UDF. You can call the Python UDF after you create the UDF. We recommend that you use a Linux operating system. If you use a Windows operating system, we recommend that you use Docker.
Reference third-party packages that are dependent on DLLs
You must compile the .so library file based on the source code of a third-party package, generate a wheel package, and then change the name extension of the wheel package. Then, use the MaxCompute client to upload the wheel package and the .so library file and create the UDF. You can call the Python UDF after you create the UDF.
Prerequisites
Make sure that the following requirements are met:
Python is installed. We recommend that you install Python 3.
The MaxCompute client is installed and configured. For more information, see Install and configure the MaxCompute client.
pip, setuptools, and wheel are installed if you want to use Python UDFs to reference third-party packages that need to be compiled. You can run the
pip install setuptoolscommand to install setuptools and run thepip install wheelcommand to install wheel.PROJ 6 is installed if you use a third-party package of GDAL 3.0 or later.
Docker is installed if you use Docker to compile third-party packages. For more information, see Docker documentation.
Reference NumPy packages in Python 3 UDFs
You can use Python 3 in MaxCompute to reference NumPy packages. By default, the NumPy library is installed in Python 2 in MaxCompute. You do not need to manually upload NumPy packages in Python 2. To reference a NumPy package in Python 3 UDFs, perform the following steps:
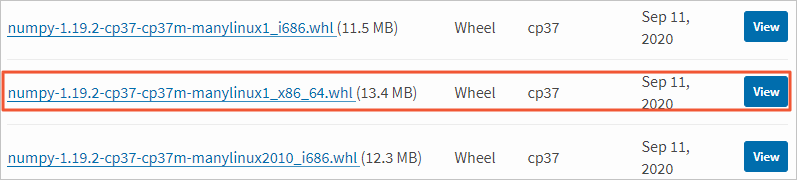
In the Download files section of the PyPI page, click the package whose name ends with cp37-cp37m-manylinux1_x86_64.whl to download the package. In this example, NumPy 1.19.2 is used.
 Note
NoteIf you download a package whose name ends with other characters, the operation may fail. If you need to select another version of the NumPy package, click Release history in the Navigation section in the upper-left corner of the PyPI page to view the historical versions.
Change the name extension of the downloaded NumPy package to .zip.
Example: numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip.
Use the MaxCompute client to upload the NumPy package to your MaxCompute project. For more information about how to upload the package, see Resource operations.
Sample commands:
ADD ARCHIVE D:\Downloads\numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip -f;Write a Python UDF script and save the script as a PY file.
In this example, the saved file is named import_numpy.py. The following code shows the Python UDF script:
from odps.udf import annotate @annotate("->string") class TryImport(object): # The class name is TryImport. def __init__(self): import sys sys.path.insert(0, 'work/numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip') # The NumPy package. You need only to change the package name after work/. def evaluate(self): import numpy return "import succeed"Use the MaxCompute client to upload the import_numpy.py script to your MaxCompute project as a resource.
Sample commands:
ADD PY D:\Desktop\import_numpy.py -f;Use the uploaded import_numpy.py script and NumPy package to create a UDF on the MaxCompute client. For more information about how to create a UDF, see Function operations.
In this example, the created UDF is named numpy. Sample commands:
CREATE FUNCTION numpy AS 'import_numpy.TryImport' USING 'doc_test_dev/resources/import_numpy.py,numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip';NoteWhen you create a UDF, you must add a NumPy package, such as numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip, to the resource list.
After you create the UDF, you can call the UDF in SQL statements. You must make sure that Python 3 is enabled to execute SQL statements. For more information, see Python 3 UDFs.
Reference third-party packages that need to be compiled
If a third-party package is a TAR.GZ package that is downloaded from PyPI or a source code package that is downloaded from GitHub, the setup.py file may be stored in the root directory of the decompressed third-party package. To use this type of third-party package, you must compile the setup.py file and generate a wheel package in an environment that is compatible with MaxCompute. Then, upload the package as a resource and create the UDF. After the UDF is created, you can call third-party packages in Python UDFs. For more information about how to upload a resource and create a UDF, see Reference NumPy packages in Python 3 UDFs.
Third-party packages run in a Linux operating system. We recommend that you compile third-party packages in a Linux operating system. If you compile third-party packages in a Windows operating system, incompatibility issues may occur.
If you use a Windows operating system, we recommend that you use Python of the required version to compile the setup.py file and generate a wheel package in the Docker container created from the quay.io/pypa/manylinux2010_x86_64 image. Python of the required version is stored in
/opt/python/cp27-cp27m/bin/pythonor/opt/python/cp37-cp37m/bin/python3.
If you use a Linux operating system, make sure that the following requirements are met:
A Python version that is compatible with MaxCompute is used. You can run the following command in the command-line interface (CLI) of your system to check the Python version:
python -c "import wheel.pep425tags; print(wheel.pep425tags.get_abi_tag())"If
cp27morcp37mis returned, the Python version meets the compatibility requirements.If
cp27muorcp37muis returned, the Python version does not meet the compatibility requirements. In this case, you must run the./configure --enable-unicode=ucs2command to change the Python encoding format to UCS-2.
If code in C or C++ is required, your Linux operating system must be compatible with the GNU Compiler Collection (GCC) version in use.
NoteWe recommend that you use GCC 4.9.2 or earlier. If the GCC version is later than 4.9.2, the .so file in the generated wheel package may be incompatible with MaxCompute.
If all requirements are met, perform the following steps to compile the setup.py file and generate a wheel package in the Linux operating system:
Decompress a third-party package to your on-premises machine and run the required command in the CLI to go to the path where the setup.py file is stored.
For example, the GDAL-3.2.0.zip package is downloaded. After you decompress the package, the setup.py file is stored in D:\Downloads\GDAL-3.2.0. Sample commands:
cd D:\Downloads\GDAL-3.2.0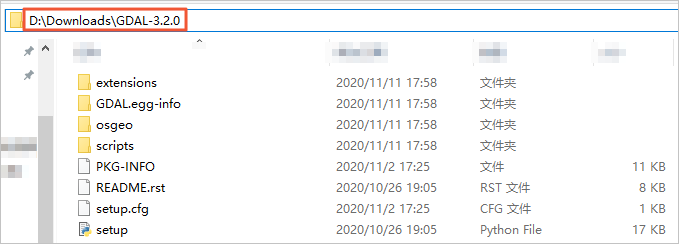
Run the following command in the CLI to check whether bdist_wheel is returned:
Sample commands:
python setup.py --help-commandRun the following command in the CLI to compile the setup.py file and generate a wheel package:
python setup.py bdist_wheelNoteThe wheel package is stored in the dist folder.
Reference third-party packages that are dependent on DLLs
Some third-party packages for Python depend on Python libraries and other DLLs. This section describes how to use the Docker container to compile the .so library file and generate a wheel package that can be used in MaxCompute. The container is created from the quay.io/pypa/manylinux2010_x86_64 image. GDAL 3.0.4 is used in this example. You must upload the generated .so library file and the wheel package or NumPy package as resources and create a UDF. After the UDF is created, you can call third-party packages in Python UDFs. For more information about how to upload resources and create a UDF, see Reference NumPy packages in Python 3 UDFs.
You must make sure that Docker is installed before you can reference third-party packages that are dependent on DLLs in Python UDFs. For more information, see Docker documentation.
To reference third-party packages that are dependent on DLLs in Python UDFs, perform the following steps:
View the dependencies in the Dependencies section of the PyPI page.
The following figure shows the dependencies of GDAL 3.0.4.
 Note
NoteIn the preceding figure, the dependencies include libgdal and numpy. To obtain libgdal, compile the GDAL source code in the Docker container. To obtain numpy, download the NumPy package on the PyPI page or from the Docker container.
Obtain the NumPy package.
You can use one of the following methods to obtain the NumPy package:
In the Download files section of the PyPI page, click the package whose name ends with cp37-cp37m-manylinux1_x86_64.whl to download the package.
NoteIf Python 2 is used, perform the following operations to download the NumPy package: In the Navigation section of the PyPI page, click Release history, select 1.16.6 or an earlier version, and then click the package whose name ends with cp27-cp27m-manylinux1_x86_64.whl.
Run the
/opt/python/cp37-cp37m/bin/pip download numpy -d ./command in the container created from the quay.io/pypa/manylinux2010_x86_64 image to download the NumPy package to the current directory.
Compile the .so library file.
Download the GDAL 3.0.4 source code file and decompress the file to your on-premises machine.
Download the Docker container created from the quay.io/pypa/manylinux2010_x86_64 image and enter the input mode of the Docker client.
Sample commands:
docker pull quay.io/pypa/manylinux2010_x86_64 docker run -it quay.io/pypa/manylinux1_x86_64 /bin/bashUpload the GDAL 3.0.4 source code to the Docker container.
Sample commands:
docker cp ./gdal-3.0.4 <CONTAINER ID>:/opt/source/For more information about how to obtain CONTAINER ID, see docker ps.
Compile GDAL 3.0.4 source code in the container. For more information, see BuildingOnUnix.
Sample commands:
# Specify the directory to install PROJ 6 in the configure field. ./configure --prefix=/path/to/install/prefix --with-proj=/path/to/install/proj6/prefix make make install export PATH=/path/to/install/prefix/bin:$PATH export LD_LIBRARY_PATH=/path/to/install/prefix/lib:$LD_LIBRARY_PATH export GDAL_DATA=/path/to/install/prefix/share/gdal # Test gdalinfo --versionThe following errors may occur during compilation:
configure: error: PROJ 6 symbols not found: If this error occurs, install PROJ 6 to support GDAL 3.0 or later.fatal error: zlib.h: No such file or directory: If this error occurs, use theyum install zlib-develcommand to compile the code instead.
Run the Docker download commands to download two .so library files (not symbolic links) to your on-premises machine. Obtain libgdal.so from the lib folder in the installation directory of GDAL and libproj.so from the lib folder in the installation directory of PROJ 6.
Generate a GDAL wheel package in the Docker container. For more information, see BuildingOnUnix.
Sample commands:
# If NumPy is required, install NumPy first. /opt/python/cp37-cp37m/bin/pip install numpy # Switch to the directory in which GDAL source code is saved. cd swig/python # Generate a wheel package and save it in the dist folder. Example: GDAL-3.0.4-cp37-cp37m-linux_x86_64.whl /opt/python/cp37-cp37m/bin/python setup.py bdist_wheelUpload the generated .so library file, wheel package, or NumPy package as resources and create a UDF. After the UDF is created, you can call third-party packages in Python UDFs. For more information about how to upload a resource and create a UDF, see Reference NumPy packages in Python 3 UDFs.
Take note of the following items when you upload a resource and create a UDF:
When you upload resources, you must upload libgdal.so and libproj.so as file resources and numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip and GDAL-3.0.4-cp37-cp37m-linux_x86_64.zip as archive resources.
When you create functions, you must add libgdal.so, libproj.so, numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip, and GDAL-3.0.4-cp37-cp37m-linux_x86_64.zip to the resource list of the functions.
Sample code for a Python UDF:
NoteThe following sample code is run in Python 3. If you want to run code in Python 2, take note of the
get_cache_fileparameter. For more information, see Reference resources in the "Develop a UDF in Python 2" topic.# coding: utf-8 from odps.udf import annotate from odps.distcache import get_cache_file def include_file(file_name): import os, sys so_file = get_cache_file(file_name, 'b') with open(so_file.name, 'rb') as fp: content=fp.read() so = open(file_name, "wb") so.write(content) so.flush() so.close() @annotate("->string") class TryImport(object): def __init__(self): import sys include_file('libgdal.so.26') include_file('libproj.so.15') sys.path.insert(0, 'work/GDAL-3.0.4-cp37-cp37m-linux_x86_64.zip') # The GDAL package after compilation. You need only to change the package name that follows work/. sys.path.insert(0, 'work/numpy-1.19.2-cp37-cp37m-manylinux1_x86_64.zip') # The NumPy package. You need only to change the package name after work/. def evaluate(self): from osgeo import gdal from osgeo import ogr from osgeo import osr from osgeo import gdal_array from osgeo import gdalconst return "import succeed"NoteIf an error that indicates libgdal.so.26 or libproj.so.15 cannot be found occurs, you must change libgdal.so to libgdal.so.26 or libproj.so to libproj.so.15.