This topic describes the ST_3DGridPath function. This function calculates paths by using a 3D grid system.
Syntax
geomgrid[] ST_3DGridPath(geometry start, geometry end, box3d range, gridcost[] barriers, params text default '');Parameters
Parameter | Description |
start | The start point. |
end | The end point. |
range | The scope of path planning. |
barriers | The cost of all grids with barriers. |
params | The parameters used for calculation. |
The following list describes the fields of the params parameter:
algorithm: the pathfinding algorithm
dij: the Dijkstra's algorithm
astar (default): the A* algorithm
nb_astar: the bidirectional A* algorithm
movement: the movement mode
cross (default): moves only to adjacent grids
octothorpe: moves to adjacent and diagonal grids
strict_octothorpe: moves to diagonal grids when adjacent grids are passable
distance: the distance estimation method
euclidean: the Euclidean distance
manhattan (default): the Manhattan distance
chebyshev: the Chebyshev distance
Example: {"algorithm":"astar","movement":"strict_octothorpe"}.
If the params parameter is left empty or some fields of the parameter are not configured, the system uses the default values.
Description
This function calculates the grid path based on the specified data.
The start point and end point are 3D points, in which the values on the z-axis can be inaccurate. The algorithm automatically finds appropriate values on the z-axis for the 3D points and plans the path.
The range parameter specifies the range of path planning, which is configured based on digital surface model (DSM) data.
The barriers parameter combines the costs of all grids with barriers. You can call the ST_CostUnion operation to query the value of this parameter.
If the params parameter is left empty, the system uses aster, cross, and manhattan by default. The calculation result is an array of geometry grids arranged in sequence.
Examples
select st_astext(ST_3DGridPath(st_geomfromewkt('srid=4490;POINT Z (1 1 1)'), st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d, st_costunion(array[st_setcost(array[st_gridfromtext('GZ0000000001')],1), st_setcost(array[st_gridfromtext('GZ0000000000')],5)])));
--------------------------------------------------------------------------------
{GZ0000000006,GZ0000000042,GZ0000000046,GZ0000000064,GZ0000000420,GZ0000000422,
GZ0000000426,GZ0000000604,GZ0000000640,GZ0000000644,GZ0000004200,GZ0000004240,
GZ0000004244,GZ0000004600,GZ0000004602,GZ0000004620,GZ0000004622,GZ0000006400,
GZ0000006420}
select ST_3DGridPath(st_geomfromewkt('srid=4490;POINT Z (1 1 1)'), st_geomfromewkt('srid=4490;POINT Z (5 6 3)'),
'BOX3D(0 0 0,10 10 10)'::box3d, st_costunion(array[st_setcost(array[st_gridfromtext('GZ0000000001')],1), st_setcost(array[st_gridfromtext('GZ0000000000')],5)]), '{"algorithm":"astar","movement":"strict_octothorpe","distance":"euclidean"}');
--------------------------------------------------------------------------------
{GZ0000000006,GZ0000000060,GZ0000000066,GZ0000000600,GZ0000000606,GZ0000000660,
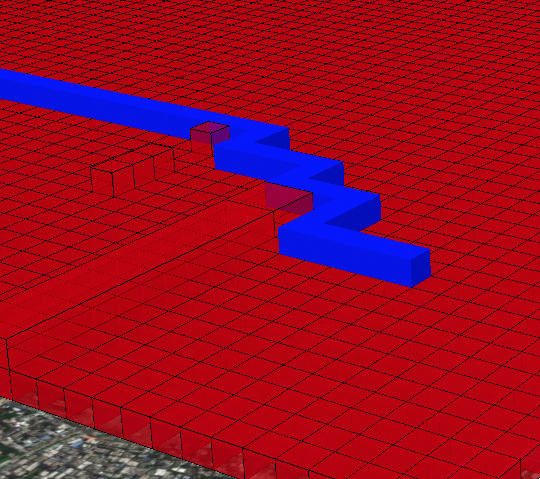
GZ0000000666,GZ0000006000,GZ0000006040,GZ0000006044,GZ0000006420}3D grid system